

Making of XRAY XB2
Exclusive story by
Martin Bayer
XRAY XB2 Designer
European Champion
Never before had I expected that designing an RC car would be such a complicated, complex, difficult, stressful, and extremely time-consuming thing to do.
Really, I could tell you nightmare stories first-hand as the soon-to-be-released XB2 is my first real-life entire project that I have worked on, and it was a challenge that gave me to a whole new level of understanding and appreciation of the RC car world.


How did I get here?
I joined Team XRAY several years ago not only to race their cars, but also to be part of the development team. As I live fairly close to XRAY, I knew I could be involved in the daily operations and part of the projects in ‘real time.’ But let me tell you one thing – if you know someone who is a perfectionist, someone who strives for absolute perfection – then multiply that several times and you may get close to XRAY’s level of perfectionism. But only close. To work with XRAY and with Juraj, I had to adapt to this mentality and extremely fast work pace. There are not many days when you actually can take a short break. But now having gone through all that pain, I can understand and appreciate everything that much more. I learned so much, words alone cannot describe. Here is a glimpse of my project that I worked on.


First Project
My first involvement in R&D started a few years ago with working on the new XB8 platform. I was testing various parts, working on the optimum suspension & chassis flex, and I learned everything and was reporting back to the factory. Any ideas on new parts or modifications were turned into new prototypes which I tested again & again, and this was the way we moved onward. The re-release of the XB8 platform was very successful, and only then I realized how rewarding it was to be part of something so successful. After my fruitful participation on this project, I became directly involved in the XB4 platform which was already designed at that time and as such I became responsible for further development of this car. My work on the XB4 culminated in the recently-released 2016 spec version of the XB4 with which Bruno Coelho won the World Championship in Japan only a few weeks ago. I have been very happy with the progress of my involvement in R&D, and the results could not be any better. But certainly the great results are only rewarded by hard work (and sleepless nights).


As I became more involved in R&D, my daily routines changed. I did not run the cars to seek the best set-up nor learn the best race lines any more. Now I was more focused on understanding and learning the design approach of every single part, and their interaction and final effect on handling and performance. This gave me a completely new perspective. I learned every single detail that influences the car such as material specifications, flex characteristics, machining tolerances, and quality control as well as having to consider production efficiency restrictions and the manufacturing process from our incredible in-house manufacturing team at the XRAY Factory.


New Challenge
After gaining my first experiences with working at XRAY, I became more & more involved in R&D work. Then the day came when I faced my biggest challenge to date - I was asked by Juraj if I wanted to work on the new 2WD 1/10 off-road buggy, and take responsibility for it. Without thinking about it for a second I agreed to it! (Some days, though, I wonder if I had signed a deal with the Devil that day.)

XB4 2WD Project
When the first XB4 was released a few years ago, the team had started to travel to the 1/10 off-road races and we needed a 2WD car to race with. As such, the fastest solution was to convert the XB4 into 2WD, and if the car worked out well we planned to make it available for all customers. Our idea was to use as many parts from the XB4 as possible, to minimize the spares needed by most drivers. We believe that most drivers would appreciate that consideration.

The first XB4 2WD prototype was made very quickly, and it was doing surprisingly well especially in high-traction conditions on carpet and astro. In some races the car was outperforming everyone else and I could even win some of the EOS rounds. However in other track conditions we had to work very hard to just stay competitive. The main struggle was due to the fairly heavy front suspension which worked great for 4WD but was an obstacle in 2WD because not only the weight but also the geometry was not optimal. Moreover, the more we tested various weight balance configurations, the more we were convinced that we would need a completely different and specifically-designed 2WD platform for regular drivers to keep up with and beat the ever-increasing competition.


In the last few years, the competition level has been increasing tremendously and we had to keep up. No matter how hard we tried to stay up to date with the XB4 2WD, there was no other way than to make a purpose-built 2WD off-road car.


Pure 2WD Project
Based on our experience with the XB4 2WD, we knew exactly what we wanted to achieve and we knew what we had to avoid, but unfortunately we missed the most crucial decision in the very beginning. Not only the XB4 2WD but probably all the other cars in the market at that time were working well in some particular track conditions, but were not so good in others. In other words, we believe that there was not a 2WD car that could work best in all different track conditions. We wanted to outperform everyone and we wanted to make one car that would work great everywhere, and so we set a very high target.
Now I know that that decision cost us more than a year of development going back & forth. Only now I know that we set the most difficult goal right from the very start. To design one 2WD off-road car that would work in all track conditions – from high-traction carpet & astro … to medium-to-low traction clay tracks … to super-low traction, dusty tracks – seemed at one point almost impossible. But did we give up? No, but it took us several years of blood, sweat, and tears to achieve that lofty goal.


Before we started work on the XB2, I had to think about all the smallest details that we needed to make adjustable. Making changes when the design is finished is a serious time waster, not only from a financial point of view. At this point I started to realize how much responsibility a designer carries on his shoulders. Any small detail forgotten or any small mistake could cost us hundreds of hours of redesign time for the platform, which would set us back again.


The pressure and stress were really high, but luckily I was supervised by Juraj. We discussed every detail and every idea I had, and thanks to his masterful wisdom and experience we eliminated a lot of problems that arose. Juraj was the one who immediately started to challenge the thinking of my approaches leading me to think in different ways and different perspectives about every part, to be mindful of all related details but also to keep everything open for future modifications or options. At a later stage, Juraj started to share with me his vast experience of production, which I continued to be amazed by as the projects evolved.


Every single part I first had to discuss with Juraj from a production point of view. He introduced me to relationships with production techniques: which shapes are feasible to produce, and which designs would be either impossible to produce or would be so expensive that they would not be economically feasible. So I was constantly learning and absorbing information, and my brain started to look at things and problems in different ways. And all through this, we were moving forward. Despite a lot of pressure being on me, those days were the ones that saw huge leaps forward in my understanding of RC car design and production.


Prototype #1
To make the prototype quickly, we designed & made rapid prototypes for only the rear part of the car; we used the front suspension from the XB4. (Later on we learned that that was a mistake.) The first prototype featured a motor mount with various mounting alternatives and you could install it either in the middle or in the rear of the car and either on left or right side.


To allow the motor to be installed in the rear of the car behind the rear suspension, the top shaft had to be placed higher which increased the CG which helps in the dusty, low-traction conditions since the weight is mostly in the back. With the high CG, the car had too much traction on carpet tracks and it rolled too much. I expected that the car would be good in dusty conditions thanks to the design of the motor mount, but whatever I did the performance was not as expected on dusty tracks. The mistake we made was focusing too much on the rear of the car, and not working on the front suspension nor paying enough attention to the chassis flex.


After extensive testing and spending a few months on this version, we dismissed it – even though versions of this prototype were used successfully at EOS races, we knew we needed to work on other areas of the car for other racing conditions. Later on we realized that it was not a 100% good decision either. Now I know that if we had focused on proper chassis and side guard flex as well on the front suspension flex & geometry at that time, it could have saved us up to a year of development. But hindsight is a wonderful thing, and we only know this now after we went through all the challenges so all that hard work has not been totally lost (thankfully).


Prototype #2
For the second version of the XB2, we decided that we needed to test a full car with everything. This prototype stage took the longest time as the engineers had to draw all the parts, and then all parts had to be produced. After brainstorming with Juraj and considering our previous experience with the motor mount with upper top shaft position, we went in an opposite direction and went with the top shaft down which lowered the motor and entire CG. Our intention was to have the gear box adjustable so we could shift the motor and weight frontwards / rearwards which has significant influence on handling between low, medium, and high-traction conditions. Then we wanted to adjust the car to specific conditions with different chassis, side guards, and different suspension materials.


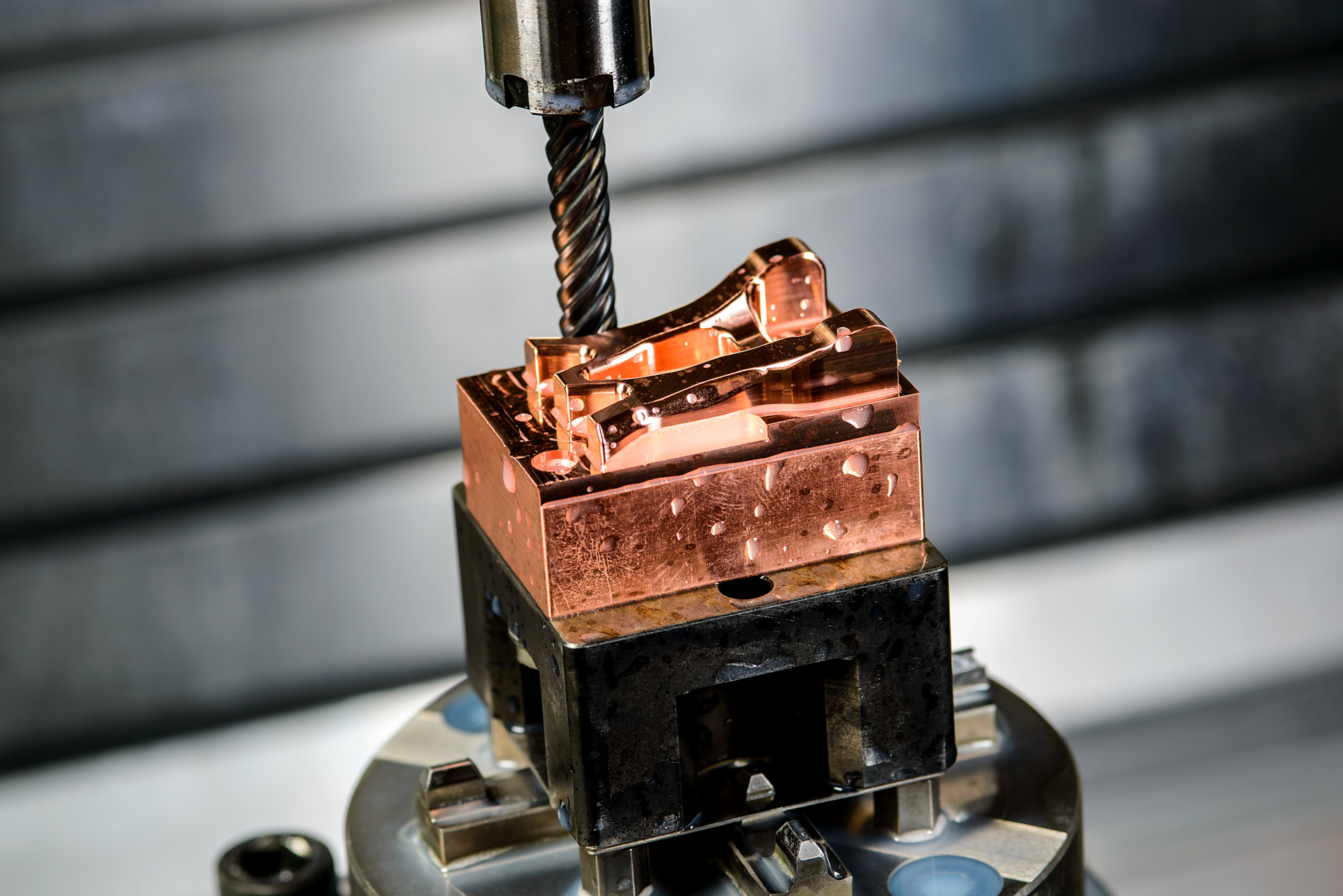
We knew that we could not do serious testing with only rapid prototype parts, because they had completely different flex and characteristics than the standard composite parts. For this reason we decided that we need to invest the time & resources into moulds, but instead of very expensive and precise mass production steel moulds Juraj decided on rapid aluminum moulds which are CNC machined with the shape of the parts. These aluminum moulds are much faster to produce economically, but do not get mislead. To produce even these aluminum moulds takes several hundreds of hours each, despite them being suitable only for small quantity production.


In total we needed to make 11 moulds to be able to test the car and it took several months until all the moulds were produced. When the moulds were finished the real alchemy started. Composite mixtures are what make the characteristics of the car what they are, they have a direct impact on the car's performance, consistency (batch after batch), and on-track reliability and strength. XRAY is known worldwide for their own self-developed special composite mixtures, particularly from their on-road classes where much of XRAY's development took place over many years with huge focus on flex characteristics and the effect on overall traction. Being involved in this stage of the project, I never realized that you can make one composite mixture in dozens of different ways and ratios, changing some part of mixture by just a few % results in a completely different product. Of course I am not allowed to elaborate any further details. It took Juraj many years of trial & error testing of dozens (if not hundreds) of different mixtures until he developed his very own mixture recipes.


As the recipes are confidential like Coca-Cola™ recipes, I was not involved in all details but I received each composite part made from various mixtures, each labeled with a code for back identification. At one point I had dozens of different combinations of parts on my desk and needed to test and understand each of them and their influence on the track and only after that looking for the best combinations. If one mixture was good for a suspension arm it did not have to be the same for the side guards. And what worked well on carpet might not work so well on clay. Of course by then I already had experience from the previous project, and Juraj gave me good guidance and divided all the various parts in three categories: medium, hard, and extra-hard to make the life easier for me. We knew that hard composites would work on high-traction tracks (carpet/astro) while the medium composites were best suited to low-traction tracks, so I did not have to lose time testing something that we already knew wouldn’t work.


My job then was to test all the suitable composite mixtures and their combinations to select the ones I liked for myself. I couldn’t believe that such small differences in composite mixtures had such significant influence on how the part works on the track. With a huge pile of composites to test, I literally spent hundreds of hours testing different combinations and making notes on every one of them. To make sure that my results were not influenced by improper weight distribution of the car, I also had to test different combinations of composites in addition with different combinations of weight balance adjustment. So at one point there were so many combinations that I was getting overwhelmed and lost, and I had the feeling that with so many possible combinations this would never end. Luckily we were moving forward but sometimes it felt like it took a lot of focus and time. But again I was learning the extreme detail that Juraj expected would go into this area of the car.


After several months I was becoming more satisfied with the progress of this second version of prototype. The car was more stable and faster than the first version, but jump landings were still not to my liking, and cornering speed was still not what I wanted to achieve.


By spending more time, I started to perfectly understand in detail each various flex and what influence they had on cornering speed, bumps, landing, jumps, traction, etc. Then coming to a new track I right away knew which combination to put into the car and it worked very well right from the beginning. Any time I had a feeling that I found the proper combination of parts, I had Juraj check the same combinations on his car as we needed to be sure that this combination is not only suitable to my driving style but it is also good for the regular drivers like Juraj. Luckily, most of my findings & feelings of the combinations felt the same to Juraj and there were only a very few situations where he would not agree. It was funny but the more frequent situations used to be when I told Juraj that I felt a difference between mixture A and B in a slight improvement in the corner and by an improved drive through chicane… but Juraj did not feel any difference between them, so for him it did not matter which one to use. But for me for high-competition racing, I felt the difference and knew which one would be the better one.


Most of the testing of this prototype was done during the wintertime, and we perfectly fine-tuned the car for high-traction conditions. After a lot of work we knew we had a car that worked really well on carpet and would very likely perform great on astro as well. After the wintertime we were finally able to get to outdoor tracks. We were of course nervous as I knew that the track conditions would be all different and would determine if the work we had done in the last few months was in the right direction or not.


To our disappointment the car did not work so well in low-traction conditions like it had on high-traction tracks. At first we thought that we just needed to find the proper composite mixtures and test them in a combination with different chassis material, either being it composite, aluminum, or graphite. So at this stage I spent countless hours at the outdoor tracks testing this & that, changing parts back & forth, but still nothing to our total satisfaction. We needed a car that would work great not only in high-traction conditions but also on medium- or low-traction tracks. The longer I tested outdoors, the more I got depressed. We had been working on this project for 2 years already and it seemed that we were right back at the beginning.


To be certain that it was not only my personal feeling, we had Juraj doing the same tests and unfortunately he confirmed the same things. We spent some more time testing different ideas, we made small progresses but not the serious improvements that we badly needed. We actually felt that the first prototype – despite being a hybrid prototype – worked better in very-low traction conditions. As such we came to the decision that we needed to change this prototype and focus on chassis flex and weight distribution for low-traction conditions. Those days, the Dremel® Tool was our best friend and we improvised and tested again many different things over & over.


The more we worked on the car, the more we were convinced that we needed a different weight balance and different flex of the car for low-traction tracks. It was a very disappointing moment, but we had to face reality and admit that we needed to go back to the drawing board and make some serious changes if we wanted to have a car that was fully competitive even in under low-traction conditions.


Prototype #3
Despite all the challenges we were facing and the recent disappointments, we were all fully motivated to finally break into a new direction. At this point I realized how “crazy” Juraj is when it comes to accomplishments, the more we continued to struggle the higher motivation he had and the harder he worked. Sometimes it seemed like there is nothing he cannot do. I do not know where his motivation comes from, but despite our continued struggles the increased motivation was transferred to me despite myself being completely exhausted with no time to relax. As such without taking any extra time to cry about the current situation, we were back in the R&D stage – again, delaying the project.


I started to feel the pressure from the public and rest of the team. The competition level had in the last year increased again, and the XB4 2WD was hardly competitive in most conditions. Drivers and customers required 2WD and 4WD from the same manufacturer and since we did not have any serious 2WD it was obvious that we started to lose customers in the 4WD class despite the XB4 being one of the best 4WD off-road cars out there. At every event we were getting the same questions, we had mailboxes full with the 2WD questions, and of course the pressure from distributors on XRAY was increasing. And yes, all of this pressure was transferred back onto me as well. Thing were getting critical, and we had to act quickly… and correctly. The world was watching.


With the two different versions of prototypes and dozens of different composite mixture combinations and different chassis material and flex characteristics we already tested, we knew exactly which combinations were good for which conditions. It was pretty much clear that it is impossible with one car to cover all different track conditions. However, we still kept the idea and goal to have one platform that would allow us to have the car for each track condition even if we would need to change some key parts on the car.


After brainstorming, analyzing, and thinking about everything what we did in the last 2 years, we decided what we needed to do. The main change was again in the gear box and motor mount assembly and the weight balance of the car, and we needed to change the flex adjustment of the chassis as well. The previous prototype worked great in high-traction conditions so we needed to keep all the configuration from previous prototype but to make it in such a way that it could be changed for low- and medium-traction conditions.


As we started to redesign the gear box we changed the concept to make it easier to access the differential without needing to disassemble the whole rear end of the car – which was one of the main things I did not like on the previous. In addition we have reworked the steering and Ackermann geometry and suspension arm shapes to allow the arms to flex more in the low traction conditions. The key area that we reworked significantly was the way how chassis flex is adjusted together with the side guards and front braces and other parts.


After we redesigned the car, new different moulds had to be created so again several months were spent on production after which I got the new gearbox, new arms, new side guards, new middle brace and also a composite chassis together with aluminum, fiberglass, and graphite alternatives to test. With the load of parts I received, we were back where we were the year before. The positive was that I already knew what was working and what was not, so firstly I confirmed that what worked on Prototype #2 also worked on Prototype #3 and only then did I focus on areas which needed improvement.


With the design of this prototype, I could easily swap all the different components so either I came to low, medium, or high- traction conditions, I could easily change chassis, side guards, shock towers, suspension parts to the configuration I needed for the particular track conditions. This has worked great and it was really a joy to quickly adapt to the track.


The first outdoor track we tested on was a medium-traction clay track and luckily the car worked very well. I spent another huge amount of time testing the favorite and selected composite combinations, and it confirmed what we knew from previous testing and experiences: different composite mixtures would have to be used for low- and medium-traction tracks, and different hardness parts for high-traction tracks. To confirm our test results, we visited another outdoor track and the results were pretty much the same so we knew we were finally on the right path.


After more extensive testing back & forth, we were much more confident that we had achieved what we needed. As we have successfully made long term tests in low, medium and high-traction tracks, we were finally convinced we had the car we were looking for. The only track we did not test the latest prototype was the very dusty, low-traction conditions. We were confident that the car would work well in such conditions as well, but to be again at the very top performance we knew from previous testing that we would need to have the motor configuration like on our Prototype #1 which has the top shaft above and a possibility to install the motor in middle or in rear behind the rear suspension. After some time we got to a dusty, low-traction track and it confirmed what I expected. Prototype #3 worked very well but for the highest level competition racing it still needed some more traction and cornering speed.


We made some modifications to the chassis and some other parts to allow the installation of the gearbox and motor mount from the Prototype #1 which put the top shaft in a higher position which transfers the weight balance to the rear and generates more traction at the rear of the car. As expected, this configuration greatly helped the car in super-low traction conditions. Finally after almost 3 years of never-ending testing and development, I was completely satisfied and I knew that now I finally had the winner in our hands.


Final Design Decision
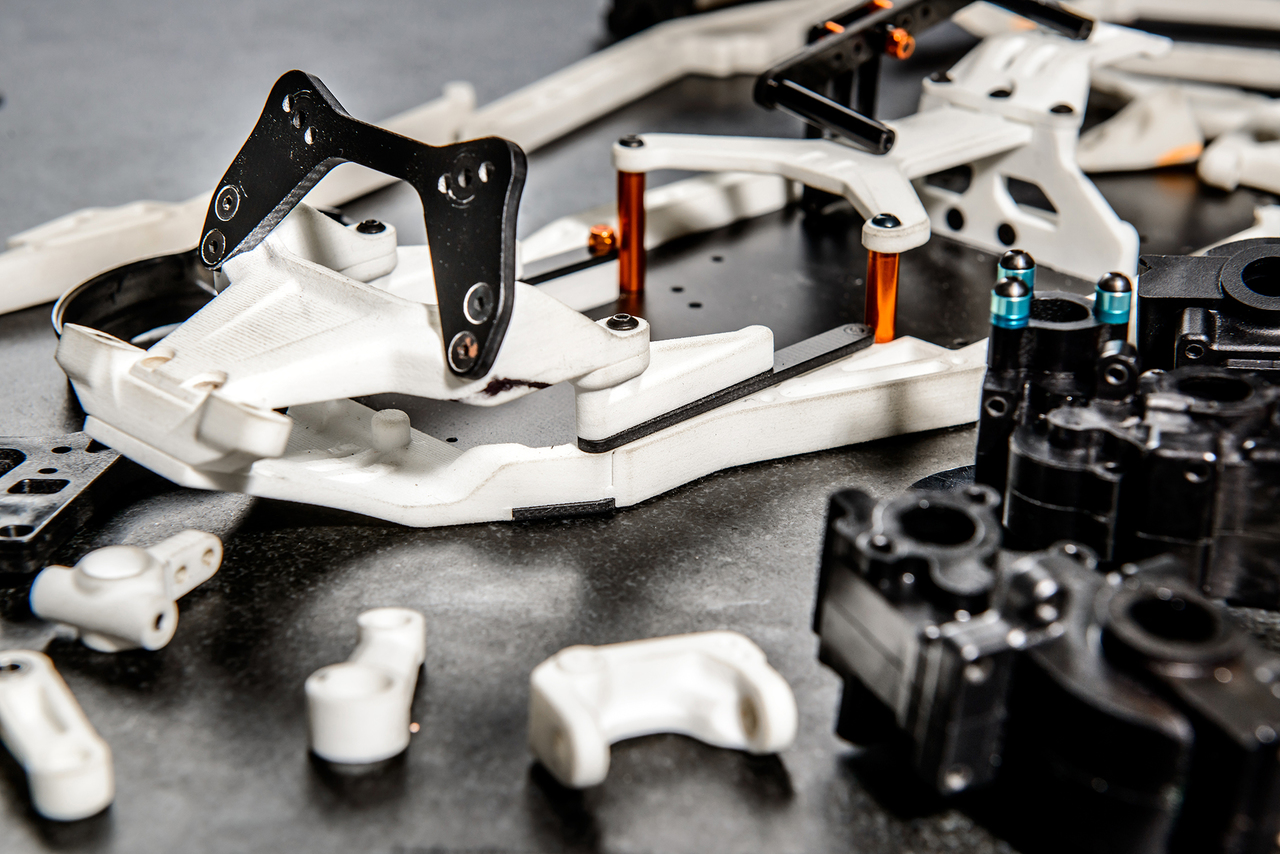
During the above 3 different prototype stages, we made several prototype pieces for the team so the entire feedback does not rely on my personal feelings only. As prototype production is extremely expensive, we made several pieces only and distributed them among the team. However, some of the prototype parts broke or wore out and the amount of running cars was decreasing, so at some point we were in a situation that we had to ship the last few prototypes left among the team depending on who had a race on which weekend. This was of course a minor issue that set us back a little and required extra logistic management. However, of greater importance was that it was not only myself but everyone else testing the car that confirmed the same performance experiences in different track conditions.

As time passed quickly, we had to decide what to do for the final design of the car for mass production. Almost all composite parts were still made only from rapid aluminum moulds so we had to make final decisions for every single part. After several years of development changing and testing so many different parts and ideas, we finally came to that point that we were ready. The stress and pressure was lifted, or more truthfully was shifted back onto Juraj who now had to work out everything from a projection point of view, to ensure that everything would progress as needed.


Firstly we fine-tuned the entire XB2 approval process to determine which parts would make it to the final design, and which final changes and improvements would be incorporated. One significant last-minute change was the change of the chassis design to allow the mounting of two different gearboxes and motor mount holders that would allow placement of the motor in all 3 different positions so the car worked great in every single track condition including the dusty super-low traction conditions or super-high traction astro tracks. This was one of the main features that I really like and I am sure everyone else will appreciate on the production car.


Final Design Production
After we chose all the final parts, the details and dimensions were updated, improved and fixed in 3D, and then after that the most time-consuming and expensive part of production started – the production of the moulds. Being involved in the production process, I can assure you that despite all the parts that are seemingly easy to produce, reality is quite the opposite and it is often quite difficult. Mould production and the way XRAY places the absolute highest focus on the finest of precision detail is an extremely time-consuming but ultimately worthwhile process. At the end the final product looks and works as perfectly as everyone is used to with XRAY composite parts. To fine tune the holes and important sizes the same mould goes on- and off- the machine, endless corrections and changes are made, pre-production pieces are moulded and then measured and modified accordingly. All the artistic and skilled hand work that the staff incorporates is incredible to watch. To the untrained eye, it all seems like a precision Swiss watch production with absolute focus on the smallest details.

Our goal was to have everything for the XB2 produced and ready for release with the new XB4, and as such to have final production cars and enough spare parts for the World Championship in Japan. With XRAY’s in-house production at maximum capacity, producing all the aluminum, steel, CF, and moulded graphite parts for all their other expected race projects – X12, T4, X1, and XB4 – pushed production expectations well beyond what was realistically possible, so to our great disappointment some of the XB2 steel and aluminum parts even did not start in the (mass) production. Sadly, as time was coming close to the Worlds, we knew there was no chance to finish all the moulds on time, so we had to leave without the production version for the trip to Japan.


First XB2 Race Debuts
After production analysis and a “best scenario forecast” for production was calculated, it was clear that there was no chance we make everything on time for the first EOS season opening race nor for the Worlds, not only for mass production but also for all of the moulds to have at least some team cars. This was very bad news, as the entire prototypes production was so expensive. Sure we were happy that we finished the entire development and were looking for mass production already, but unfortunately we had to accept the situation and with the upcoming World Championship there was no other option than to again produce several team cars separately just for the travelling international race team. Juraj was not happy about this and all the extra costs involved, but there was no other choice and we could not pack up after 3 years of insanely hard work.

In a last-minute decision, Juraj suggested that our touring car ace Bruno Coelho should try to race 1/10 off-road at the EOS season opener, and if he performed well we could take him to the Worlds. Bruno came to our indoor track for private testing, and after some practice days it was clear that his talent would allow him to compete in this class as well. In early September we got the team cars out of production and made our first debut at the EOS with a great result. To the surprise of the entire crowd, the XB2 worked absolutely brilliantly and Bruno showcased his talent by taking TQ honors in qualifiers and we got 3 cars qualified into the A-main. This was certainly a satisfying moment when finally the first real achievement arrived after so many years of brutally hard, never-ending work.


After the debut race at EOS we travelled to Japan for the World Championship where the XB2 confirmed it was fully competitive amongst the world’s best drivers. Not only for the XB2, but also for me and Bruno this was the first World Championship in this class. In qualifiers, Bruno unfortunately had some wrong electronics setting that caused a few problems through a special small-bump section (which we found out after qualifications). At the end I was able to make it to the A-main final and was at the same pace with everyone else but could not make it to the podium. But most importantly, after 3 years of work we had a car that was fully competitive among the world’s best drivers, and as such I could rest a little and hand over the final stages of the XB2 production to the incredible XRAY manufacturing team.


What’s Next?
So this is my story and a small view into the last 3 years of my life. They were extremely tough & demanding, but I learned a lot and improved my knowledge & skills to an all-new level. All of this would not have been possible without the guidance of Juraj as my mentor, the one who got me involved and put his trust in me. To be part of a complex project like this has been a great experience, and I cannot wait for the next projects. At this moment, the production just finished everything, the design team is working on the instruction manual, the web site and everything else necessary for a successful product release, and I am enjoying the last moments of this project before it goes public.

Am I nervous? Hell yeah! This will be the first time that a complete start-to-finish project I was responsible for will get into the hands of public who will judge and evaluate my work. I did my best to make the car that measures up perfectly to my expectations and high-performance racing style as well as for any club, regional, or national-level driver. The rest of the judgment is up to you, my friends. So once it becomes available, get your XB2, give it a try, and let me know how you like it. I will be travelling with Team XRAY to all major races around the globe. Not only to race, test, and help customers, but to back up my own creation. Please come to see me at any time with any questions or comments. And finally… enjoy your new XB2, knowing that I put all my best efforts into this project. ‘Til next time.

